Od kilku dekad technologie cyfrowe wpływają na warsztat architekta oraz metody projektowania architektonicznego. Komputerowe wspomaganie projektowania CAD/CAM/CAE oferuje dziś narzędzia, które radykalnie zmieniają praktykę w tym zakresie, a także sposób myślenia o budynkach, ich planowaniu i realizacji. Na świecie powstają obiekty, które wyróżniają się oryginalnym wyglądem i kształtem. Wielość podejść i postaw sugeruje rozmaite intencje projektantów, w dyskursie architektonicznym zaś występują określenia, takie jak architektura topologiczna, parametryczna czy morfogenetyczna. Dotyczą one budowli, których ekspresyjność wyrażona jest w krzywoliniowych formach o wysokim stopniu złożoności.
Zobacz więcej: Warsztat architekta - akcja specjalna Muratorplus.pl
Parametry, komputer i architektura
Przypomnieć trzeba, że termin „parametryczny” wywodzi się z matematyki. Parametr to wartość występująca we wzorach i wyrażeniach matematycznych, która, w zależności od rozpatrywanego przypadku, może być stałą lub zmienną. Notabene, temperatura również jest parametrem, gdyż może być wartością stałą, np. w przemianie izotermicznej gazu, a zmienną – w innych przemianach. Parametr stanowi niewiadomą, która łączy funkcję ze zmiennymi, w przypadku gdy relację tę trudno wyrazić równaniem. Jest to więc litera pojawiająca się w formule matematycznej i odgrywająca rolę współczynnika liczbowego. W funkcji jeden argument lub więcej określa należąca do jej dziedziny zmienna (x). W geometrii analitycznej zaś figury przedstawia się jako wykresy funkcji. Zmiana wielkości parametru powoduje zmianę graficzną, czyli przebiegu wykresu funkcji.
Według słownika Webstera komputer to dające się programować urządzenie elektroniczne, które jest w stanie gromadzić, wyszukiwać i przetwarzać dane. Może zatem rozwiązywać równania parametryczne. Nie od razu jednak potrafił on obrazować wyniki graficznie. W latach 60. ubiegłego wieku technologia komputerowa i eksperymentalne narzędzia cyfrowe dla architektów nie były jeszcze gotowe do masowej dystrybucji. Przełomu dokonał w 1963 roku Ivan Sutherland. Wykorzystując moc obliczeniową nowego komputera TX-2, stworzył (w ramach pracy doktorskiej) rewolucyjny Sketchpad: a Man-Machine Graphical Communication System (szkicownik) – pierwsza interaktywna aplikacja wspomagająca projektowanie.
Zmieniło to diametralnie interakcje człowieka z maszyną. Innowacją były ekran (CRT monitor) oraz pióro świetlne. Warto podkreślić, że w 1963 roku komputery pracowały jeszcze na taśmach magnetycznych lub kartach perforowanych, „szkicownik” zaś był pierwszym programem z kompletnym interfejsem graficznym użytkownika. Za pomocą koordynatografu punków względem osi x i y umożliwiał pokazywanie linii rysowanych na ekranie. Był to prototyp systemu CAD (ang. computer aided drafting) do wspomagania prac kreślarskich. Używając pióra świetlnego, projektant mógł na monitorze tworzyć linie proste i krzywe, a następnie łączyć je ze sobą. Służyły temu równania parametryczne, które Sutherland nazwał atomic constraints (z ang. ograniczenia cząstkowe). Nie używał on jednak terminu „parametryczny”, chociaż jego atomic constraints miały wszystkie niezbędne własności ww. równania. Do każdego z ograniczników przypisany był zestaw wyników w postaci funkcji o wielu niezależnych parametrach. W przeciwieństwie do podwieszanych modeli fizycznych Antonia Gaudiego i Freia Otta równania parametryczne nie są bowiem uzależnione od praw fizyki, dlatego można obliczać relacje dla linii równoległych, bieżnych, skośnych i zakrzywionych. Sketchpad oferował nowy sposób eksploracji wspomnianych równań. Architekci mogli modyfikować parametry we wzorach matematycznych, a program automatycznie przeliczał i odrysowywał geometrię. Trudno było wówczas przewidzieć, jak wynalazek Sutherlanda wpłynie na praktykę projektową w następnych dekadach.
AutoCAD i modelowanie 3D
Jednakże, w latach 60. XX wieku projektanci byli bardziej zainteresowani komputerową automatyzacją kreślenia niż sterowaniem parametrami grafiki na ekranie monitora. W centrum uwagi znalazła się geometria samoreplikująca się przez automaty komórkowe (ang. celluar automata) oraz gramatyki kształtu (ang. shape grammar), sięgano także po krzywe Béziera, niezależnie opracowane przez Paula de Casteljau już w 1959 roku. W roku 1962 popularna później elektroniczna maszyna do kreślenia – Itek’s Electronic Drafting Machine – kosztowała 500 tys. dolarów, na co mógł sobie pozwolić jedynie przemysł lotniczy, okrętowy czy motoryzacyjny. W latach 70. XX wieku urządzenia te już sprawnie wyręczały architektów w sporządzaniu rysunków technicznych (względem osi x i y), choć modelowanie 3D, wizualizacja oraz symulacja były dopiero przedmiotami badań placówek naukowych. Eksperymentalne narzędzia cyfrowe dla projektantów nie nadawały się jeszcze do masowej dystrybucji.
Gdy 20 lat później, w sierpniu 1982 roku, wprowadzony został PC (ang. personal computer), niemal jednocześnie opracowano pierwszą wersję programu AutoCAD, który szybko wyparł samoreplikujące się geometrie. Od tego czasu architekt mógł już rysować na ekranie dwuwymiarowe obiekty, posługując się klawiaturą i myszką. Jednak dopiero 18. wersja AutoCAD 2010 została zaopatrzona w modelujące narzędzia parametryczne (43 lata po napisaniu programu Sketchpad), co AutoDesk uznał za „otwarcie nowych możliwości”. Niemniej, od początku AutoCAD oferował projektantom akcesoria do sporządzania skryptów parametrycznych w pakiecie scripting interface4. Wymagało to jednak znajomości podstaw informatyki.
Nowe narzędzia parametryczne do modelowania 3D, które zapewniał AutoCAD 2010, nie były wcale nowe. Opracowane zostały już ponad 20 lat wcześniej przez matematyka Samuela Geisberga, założyciela Parametric Technology Corporation (1985), dla programu Pro/ENGINEER, który wszedł do sprzedaży w 1988 roku. Był on zwiastunem łączenia podstawowych charakterystyk oraz metod modelujących z parametrycznym opisem cech. Podobnie jak w Sketchpadzie, użytkownicy Pro/ENGINEER mogli integrować ze sobą poszczególne elementy – już nie dwuwymiarowe, lecz trójwymiarowe – za pomocą równań parametrycznych. Oznaczało to przejście projektowania w trzeci wymiar, a syntetyczna przestrzeń stała się rzeczywistością wirtualną i medium projektowym. Dzięki asocjatywności geometrii zmiany dokonywane na jednym z rysunków 3D były automatycznie nanoszone na pozostałe, sporządzane przez wielu użytkowników. Narzędzie to przez swoją elastyczność, miało zachęcać architektów do tworzenia bardziej zróżnicowanych obiektów przy zerowych kosztach modyfikacji. Ponadto, Geisberg sprawił, że modelowanie parametryczne stało się eksploracją rozmaitych kształtów geometrycznych. Wprowadzono bowiem możliwość manipulacji parametrami oraz modelem 3D poprzez zmiany relacji bazowych. Wpływ na rozszerzanie funkcji programu miał miniaturowy napęd (B-rep), który pozwalał na obracanie i przekształcanie obiektów 3D o spójnej geometrii i topologii. Do sprawnego działania sprzętu potrzebowano jednak coraz większych zasobów pamięci operacyjnej i podręcznej oraz skrócenia czasu wykonywania zadań. Okazało się to niezwykle istotne dla dalszego rozwoju cyfrowych narzędzi parametrycznych w XXI wieku.
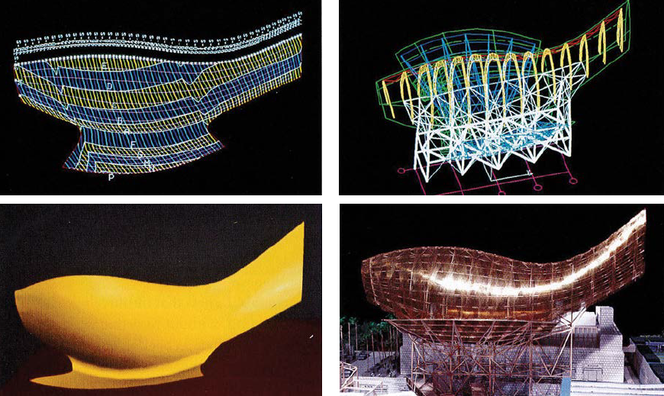
Lata 90. ubiegłego stulecia to dynamiczny okres postępu kultury komputerowej oraz szybkiego wzrostu mocy obliczeniowej sprzętu, a co za tym idzie – rozwoju grafiki 3D. Teoria mnogości dostarczyła bowiem matematyce języka formalnego do stworzenia precyzyjnych podstaw topologii, czyniąc z niej istotę syntetycznych przestrzeni w grafice komputerowej. Wykorzystała to firma Dassault Systèmes, zajmująca się oprogramowaniem wspomagającym projektowanie, i w 1993 roku wprowadziła do nowej wersji programu CATIA V4 wiele elementów języka parametrycznego, współpracujących z Pro/ENGINEER6. W tym samym czasie biuro Gehry Partners zatrudniało już Ricka Smitha z Lotniczego Biura Konstrukcyjnego, eksperta od programu CATIA. Pokonywał on wyzwania geometryczne związane z projektem i realizacją obiektu Złota Ryba w Barcelonie (1992), a następnie Muzeum Guggenheima w Bilbao (1993–1997).
Taka forma współpracy dała podstawy do założenia w 2001 roku siostrzanego przedsiębiorstwa o nazwie Gehry Technologies, któremu udało się opracować parametryczne oprogramowanie modelujące Digital Project, udostępnione w roku 2004. Wykorzystuje ono narzędzia zawarte w CATIA V5 i wprowadza nowe, przydatne architektom do racjonalizacji skomplikowanej geometrii formy, takiej jak w pracach Franka Gehry'ego. Opiera się ponadto na parametrycznym silniku pochodzącym z programu CATIA V5, który pozwala rewidować parametry i równania definiujące projektowaną geometrię w ten sam sposób, jak w przypadku Pro/ENGINEER.
Digital Project, podobnie jak CATIA, jest wszechstronny i umożliwia wymianę danych z innymi branżowymi programami, tak aby przygotować pełną dokumentację 3D projektu architektonicznego – od koncepcji po pliki dla wytwórcy (ang. file to factory), a także określić jego koszty i czas. Integracja z systemem CAM gwarantuje ponadto szybkie wykonywanie trówymiarowych modeli na każdym etapie projektu. Digital Project wymaga jednak odpowiedniego sprzętu i nie występuje w wersji przeznaczonej do komputerów osobistych (PC). Niemniej, od 2004 roku zapotrzebowanie na ten rodzaj oprogramowania wciąż wzrasta, gdyż coraz więcej firm architektonicznych zainteresowanych jest tworzeniem obiektów o krzywoliniowej, złożonej geometrii. Dziś jest on chętniej używany niż Revit (RTC 2000a), który miał być „pierwszym parametrycznym modelerem budowlanym dla architektów oraz profesjonalnych budowniczych”, jak można było przeczytać na stronie internetowej Revit dnia 10 maja 2000 roku.
Autorzy programu Revit definiują termin parametric (z ang. parametryczny) jako obiekt oparty na równaniach parametrycznych, który architekt może tylko adjustować w zależność od okoliczności jego zastosowania w projekcie. W kolejnej wersji (RTC 2001) na stronie internetowej wyjaśniano, jak korygować wysokość dachu i w jaki sposób Revit dokonuje natychmiastowej rewizji wymiarów na rzutach, elewacjach czy przekrojach. Tego typu narzędzia posługują się równaniami parametrycznym wyłącznie w celu automatycznej weryfikacji wymiarów, co AutoDesk nazwał modelowaniem. Jest to jednak nadużycie, nieuprawnione określenie. Projektant nie steruje bowiem parametrem grafiki w równaniach parametrycznych, tak jak to robi, pracując z programami Pro/ENGINEER, CATIA czy nawet Sketchpad. Relacje parametryczne Revita są niedostępne dla użytkownika i ukryte za interfejsem. Nie można zatem tworzyć własnych modeli, swobodnie nimimanipulować czy ich przekształcać, wprowadzając pożądane parametry. W kolejnych wersjach AutoDesk wycofał się z tej retoryki, ustanawiając nowy termin – „modelowanie informacji budowlanej” (BIM). Odpowiada on możliwościom i zawartości programu Revit, czyli zarządzaniu danymi (parametrami), dotyczącymi materiałów oraz technik budowlanych, a nie modelem parametrycznym jako takim. Duże firmy architektoniczne najczęściej wybierają narzędzia takie, jak Digital Project, CATIA czy Pro/ENGINEER, gdzie wyspecjalizowane grupy projektantów pracują wyłącznie nad rozwiązaniami geometrycznymi planowanych obiektów.
Modelowanie parametryczne wykonuje się sprawnie przy użyciu interfejsów skryptowych, często załączonych do niektórych pakietów oprogramowania. Skryptowanie to sposób mówienia komputerowi, co ma zrobić. Jednakże przekaz odczyta on tylko wtedy, gdy powie mu się to w zrozumiałym dla niego języku.
Twórcy AutoCAD-a, opracowując jego pierwszą wersję w roku 1982, byli już świadomi, że dodanie interfejsu skryptowego pozwoli im uniknąć zapytań odnośnie specyficznego kodowania i aplikacji, wynikających z indywidualnych potrzeb użytkowników. Kiedy 10 lat później Mark Burry chciał parametrycznie wymodelować liczne hiperbole dla Sagrada Família, nie prosił już AutoDesku o włączenie w AutoCAD-zie funkcji hiperboli, ale skorzystał z interfejsu AutoCAD scripting do sporządzenia własnych krzywych parametrycznych. Skrypt Burrego miał trzy parametry wejściowe określające punkty: początkowy, minimalny oraz asymptoty, i został napisany w kodzie AutoLISP10. Systemy parametryczne z zasady opierają się na procedurach algorytmicznych, gdyż to algorytm określa kolejność transformacji danych wejściowych, dążąc do uzyskania na wyjściu tych końcowych.
Mark Burry od 1979 roku, kontynując budowę kościoła Sagrada Família, sporządził modele parametryczne poszczególnych fragmentów obiektu i struktur przestrzennych zgodnie z zamysłem Gaudiego. Dzięki krzywym parametrycznym wykonawstwo elementów o złożonej geometrii było możliwe ze względu na przełożenie ich przez numeryczne urządzenia CNC.
Tekstowe interfejsy skryptowe nie rozwinęły się znacząco od czasu opracowania pierwszej wersji AutoCAD-a, ale w ostatnich dwóch dekadach odnotowano pojawienie się nowego interfejsu skryptowego – wizualnego. Programowanie to obejmuje reprezentatywne narzędzia przedstawione nie jako tekst, lecz diagramy. W 1990 roku powstały dwa takie interfejsy – MAX i MSP, z których jeden jest popularny wśród muzyków, a drugi w środowisku plastyków ze względu na możliwości kreowania efektów artystycznych.
Architekci swój pierwszy wizualny język skryptowy otrzymali w roku 2003. Robert Aish, pracując wtedy dla Bentley Systems, ukradkiem testował nową wersję Generative Components w kilku firmach projektowych. Gdy przedsiębiorstwo Robert McNeel & Associates bezskutecznie próbowało uzyskać licencję na Generative Components, David Rutten opracował własną wersję wizualnego języka skryptowego. Aplikację tę, wydaną w 2007 roku pod nazwą Explicit History, Rutten rozwinął i zatytułował Grasshopper. Zarówno Generative Components, jak i Grasshopper oparte są na grafach (w matematyce dyskretnej graf to para) i zapewniają możliwość odnajdywania odpowiedniej ścieżki połączeń między elementami w postaci blokowego schematu przepływu.
W ostatniej dekadzie modelowanie parametryczne przestało być postrzegane jako matematyczny trik Gaudiego, Otta, Sutherlanda i niektórych inżynierów, a stało się regularnie stosowane w praktyce architektonicznej. Programowanie zadań komputera przez skryptowanie jest obecnie integralną częścią cyfrowego procesu projektowego. Zapewnia dużą swobodę, gwarantując dostosowanie aplikacji do własnych upodobań i sposobów pracy. Jeśli w matematyce termin „parametryczny” oznacza zbiór ilościowy wyrażony w postaci funkcji o niezależnych parametrach, to w architekturze jest on odkrywaniem i badaniem coraz to nowych możliwości oferowanych przez model. Taka eksploracja jest dziś ułatwiona, gdyż pozwala zarówno modyfikować model parametryczny, jak i jego relacje geometryczne. Ponadto, dzięki automatyzacji dobrze przemyślany model parametryczny zwalnia architekta z wielu rutynowych czynności w trakcie procesu twórczego. Zaoszczędzony czas można zatem poświęcić na myślenie koncepcyjne. Omawiany rodzaj modelowania przestał być jedynie domeną projektowania architektonicznego, gdyż narzędzia parametryczne są dostępne w takich programach, jak CATIA, Pro/ENGINEER oraz aplikacjach BIM, które zostały wyposażone w tekstowe języki skryptowania oraz w oparte na grafach interfejsy wizualne. Obecnie modele parametryczne można spotkać w projektowaniu architektonicznym i wykorzystać do osiągnięcia różnych celów. Szybka ekspansja aplikacji do ww. modelowania doprowadziła do pewnego zamieszania w rozumieniu tego terminu i rozszerzenia jego pierwotnego znaczenia.