Artykuł ukazał się w publikacji „Sektor Elektroenergetyczny” 2015
Zobacz e-wydanie
W artykule:
- Przetwornice częstotliwości
- Rodzaje napędowych przetwornic częstotliwości
- Właściwości przetwornic częstotliwości a sprawność napędów
- Przetwornice częstotliwości - sterowanie napędami
- Przetwornice częstotliwości - negatywne oddziaływanie przetwornicy na silnik i sieć
- Przetwornice częstotliowści - podsumowanie
Przetwornice częstotliwości
Silniki synchroniczne (np. PMSM) z wyspecjalizowanymi przetwornicami częstotliwości (servo) są aktualnie wykorzystywane w robotyce. Roboty przemysłowe charakteryzują się dużą dynamiką ruchu, precyzyjnie ustaloną liczbą obrotów wału silnika, często z identyfikacją położenia kątowego wału silnika w stanie spoczynku. Silniki PMSM wyposaża się standardowo w enkodery inkrementalne lub absolutne w celu zapewnienia precyzyjnej regulacji prędkości lub określenia położenia kątowego wału. Znane są już rozwiązania napędów z silnikami synchronicznymi dużych mocy, niemniej jednak nie są one jeszcze stosowane jako zamienniki silników asynchronicznych klatkowych, mimo dużej sprawności i braku poboru mocy biernej.
W artykule omówione są zaawansowane właściwości przemysłowych przetwornic częstotliwości z dwupoziomowymi falownikami napięciowymi o modulowanej szerokości impulsów wyjściowych napięć fazowych (modulacja szerokościowa MSI), które są używane w napędach silników asynchronicznych klatkowych. Napędy z pojedynczymi silnikami zasilanymi przetwornicami częstotliwości nie stwarzają zwykle trudności przy ich wykorzystywaniu w typowych zastosowaniach przemysłowych.
Problematyczne są zagadnienia pochodne: pobieranie prądu niesinusoidalnego z transformatora elektroenergetycznego, zaburzenia międzyfazowe (VDM) i doziemne (VCM) za falownikiem, zasilanie silnika zanurzonego w wodzie lub umieszczonego w strefie zagrożonej wybuchem, współpraca przetwornicy częstotliwości z transformatorem o układzie sieciowym IT, stosowanie ochrony uzupełniającej w postaci wyłącznika różnicowoprądowego i inne. Omówione zostaną także właściwości przetwornic częstotliwości w aspekcie ich doboru do napędów wielosilnikowych, np. napędu sztywnego bębna kilkoma silnikami lub napędów wielosilnikowych kilku bębnów połączonych elastycznym sprzęgłem.
Patrz też: Agregat prądotwórczy. Jak dobrać agregat prądotwórczy?
Rodzaje napędowych przetwornic częstotliwości
Napięciowe przetwornice częstotliwości są podstawowym przekształtnikiem energoelektronicznym stosowanym w zautomatyzowanych napędach maszyn. Ich głównym zadaniem jest konwersja napięcia przemiennego przemysłowej sieci zasilania na trójfazowe napięcie przemienne o częstotliwości i wartości skutecznej dopasowanej do potrzeb silnika.
W napędzie silnik musi w zadanym czasie uzyskać prędkość obrotową i wytworzyć żądany moment napędowy, maksymalizując sprawność tego procesu. Aby zwiększyć produktywność silnika i dynamikę, w napędowych przetwornicach częstotliwości wykorzystuje się modele wektorowe sterowania silników (VVC, FVC, DTC), które w czasie rzeczywistym umożliwiają wymuszanie optymalnych, dla danego napędu, parametrów napięcia zasilania. Stosowane w oprogramowaniu przetwornic częstotliwości modele sterowania silników muszą zapewniać szybkie wyznaczanie wartości parametrów napięcia zasilania silnika na podstawie rzeczywistych prądów fazowych i prędkości obrotowej wału. Prędkość obrotowa silnika może być mierzona bezpośrednio, np. enkoderami (bezpośrednie sprzężenie prędkościowe), lub wyznaczana pośrednio estymatorami prędkości (pośrednie sprzężenie prędkościowe). Prądy fazowe silników są mierzone bezpośrednio na wyjściach mocy przetwornicy bezstykowymi przetwornikami (np. hallotronami firmy LEM).
Patrz też: Stacje transformatorowe SN/nn. Budowa i dobór stacji transformatorowych
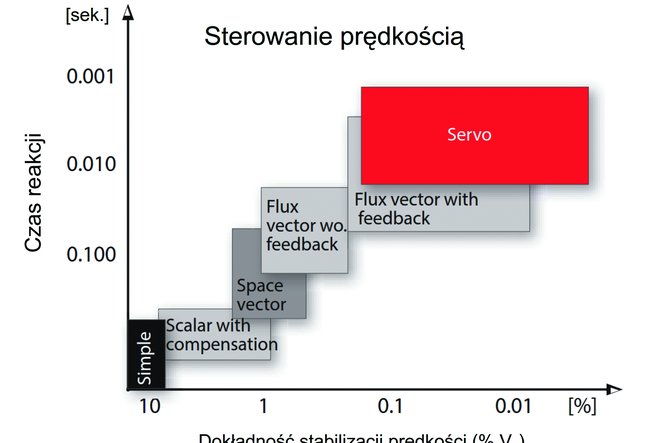
Sterowanie silników przetwornicami częstotliwości, wykorzystującymi modele wektorowe z bezpośrednim pomiarem prędkości wału silnika, umożliwia budowę napędów o dużej precyzji regulacji prędkości wału napędowego. Dokładność stabilizowania prędkości wału silnika, przy skokowej zmianie momentu obciążenia wału silnika asynchronicznego klatkowego w zakresie (0–100%) Mn, zależnie od wykorzystywanego modelu silnika, przedstawia rys.1. Wynika z niego, że przetwornice częstotliwości sterowane skalarnie, z kompensacją poślizgu, osiągają 1% dokładności stabilizacji prędkości. Przetwornice skalarne są wykorzystywane w napędach pomp, wentylatorów oraz napędów z silnikami startującymi przy obciążeniu do 50% Mn, w których nie występują skokowe zmiany momentu obciążenia silnika lub przejściowe wahania prędkości nie są istotne dla realizowanego procesu technologicznego.
Napędowe przetwornice częstotliwości nieustannie podlegają rozwojowi. Z jednej strony pojawiają się sterowane elementy mocy, które pracują dwustanowo przy coraz wyższych napięciach blokowania i przewodzonych prądach (np. tranzystory HVIGBT), a z drugiej następuje ciągły rozwój oprogramowania wykorzystującego coraz bardziej złożone algorytmy sterowania specjalistycznymi rodzajami napędów, np. wielosilnikowych, typu master-slave (silnik zadający i silniki nadążne).
Po 2000 roku napędowe przetwornice częstotliwości zostały wzbogacone w funkcję zadawania referencji momentowej. W takim trybie działania, napęd dąży do pracy z zadanym momentem obciążenia. Prędkość wału silnika zmienia się samoczynnie w określonych granicach – zadanej minimalnej i maksymalnej prędkości – jeśli rzeczywisty moment obciążenia wału jest odpowiednio większy lub mniejszy od określonego referencją.
Napędy z przetwornicami częstotliwości (DTC, FVC) mogą startować z nominalnym obciążeniem wału silnika, w tym także z silnikami niskoobrotowymi (np. 4 parami biegunów) i miedzianymi klatkami (silniki o zwiększonym momencie rozruchowym w stosunku do silników z klatką aluminiową).
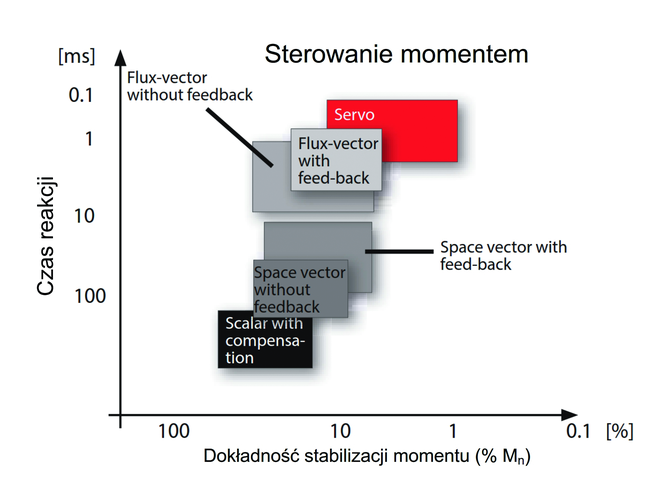
Na powyższym rysunku przedstawiono wykres zależności czasu stabilizowania momentu napędowego silnika w zależności zmiany referencji (% Mn) w przetwornicach częstotliwości. Z rysunku wynika, że przetwornice częstotliwości z wektorowym sterowaniem strumienia (FVC) i bezpośrednim pomiarem prędkości wału silnika (np. enkoderem) w ciągu 1 ms ustawią odpowiedni prąd i napięcie silnika, przy skokowej zmianie referencji momentowej od wartości zero do 100% Mn.
W artykule pominięto przetwornice częstotliwości z falownikami prądowymi, gdyż są one sporadycznie wykorzystywane w napędach przemysłowych, a kształtowanie sinusoidalnych prądów falownika jest zagadnieniem złożonym i wymaga oddzielnego omówienia.
Właściwości przetwornic częstotliwości a sprawność napędów
W przetwornicach częstotliwości o zaawansowanych algorytmach sterowania napędami wykorzystywane są funkcje maksymalizujące zarówno sprawność przetwornic, jak i silnika. Urządzenia z dwupoziomowymi falownikami napięciowymi są obecnie wykorzystywane do napędów z silnikami indukcyjnymi małych i dużych mocy. Przetwornice mają zaimplementowany przez producenta algorytm przełączania tranzystorów IGBT falownika do wytwarzania napięcia przemiennego (rodzaj modulacji szerokości impulsów). Przykładowo, modulacja nieciągła MSI60° (według firmy Danfoss) powoduje zmniejszenie strat dynamicznych (przełączania) tranzystorów IGBT falownika o 1/3 w stosunku do ciągłej modulacji MSI.
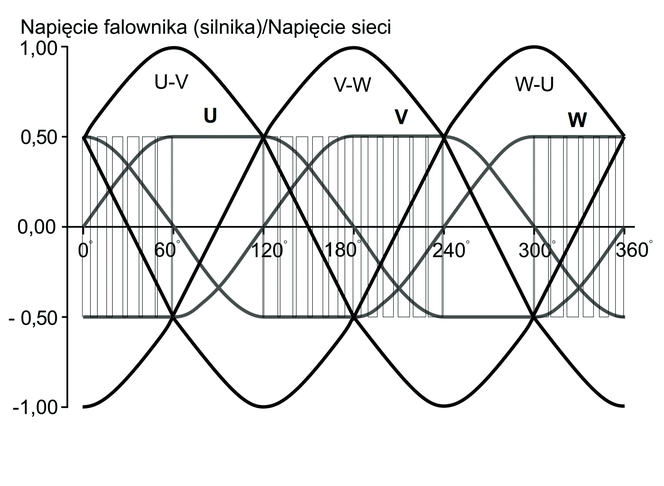
Rysunek przedstawia przebieg: czasowy napięcia fazowego U i harmoniczne podstawowe napięć międzyfazowych falownika (silnika) w modulacji nieciągłej MSI60°. Z wykresu wynika, że stosując modulację szerokościową MSI60°, przy współczynniku głębokości modulacji M = 1, uzyskuje się międzyfazowe napięcie zasilania silnika równe napięciu sieci zasilającej przetwornicę częstotliwości. W modulacji sinusoidalnej ciągłej, przy tym współczynniku, napięcie silnika jest obniżone o 13% w stosunku do napięcia sieci zasilania i aby je powiększyć trzeba zastosować przemodulowanie (M >1).
Z rysunku wynika również, że w 1/3 okresu harmonicznej podstawowej napięcia fazowego falownika nie występują przełączenia tranzystorów IGBT, dzięki czemu wzrasta sprawność przetwornicy częstotliwości. Sprawność silnika klatkowego i jego właściwości dynamiczne w napędzie z przetwornicą częstotliwości w dużej mierze zależą od wprowadzonych do oprogramowania przetwornicy danych elektrycznego schematu zastępczego silnika. Do pomiaru wybranych parametrów wykorzystywana jest procedura AMA (ang. Automatic Motor Adaptation). Umożliwia ona pomiar rezystancji i indukcyjności silnika przy nieruchomym wale. W czasie pomiaru nie jest wytwarzany moment napędowy, a silnik przed pomiarem powinien być zimny. Procedura AMA sprawdza się zwłaszcza wtedy, gdy stosowane są silniki nietypowe (np. z miedzianą klatką).
Napędy z przetwornicami częstotliwości o zmieniającym się obciążeniu silnika przy ustalonej prędkości wału napędowego mogą maksymalizować swoją sprawność poprzez zmniejszenie napięcia zasilania silnika. Wtedy wraz ze zmniejszaniem obciążenia silnika maleje składowa bierna mocy pobieranej przez silnik, co poprawia współczynnik mocy silnika cosφ. Aby zwiększyć sprawność silnika przy zmiennym obciążeniu, stosuje się procedurę AEO (ang. Automatic Energy Optimization), która w napędach z silnikami małych i średnich mocy umożliwia obniżenie zużycia energii elektrycznej do 5%.
Przetwornice częstotliwości - sterowanie napędami
Komunikacja wewnętrzna między podzespołami obwodu mocy przetwornicy częstotliwości a jej obwodami sterowania i zabezpieczeń jest realizowana binarnymi protokołami wymiany danych. Wyspecjalizowany procesor sygnałowy (DSP), np. TMS320F2812, obsługuje zewnętrzne sygnały sterowania i zabezpieczeń, a także zarządza pracą modulatora MSI, zgodnie z przyjętym modelem sterowania wektorowego silnika.
Standardowym zewnętrznym protokołem komunikacyjnym, wykorzystywanym do wymiany danych ze sterownikami programowymi PLC, jest RS485. Komunikacja szeregowa RS485 (Modbus) umożliwia budowę rozproszonego systemu napędowego, w którym kolejne przetwornice częstotliwości łączą się ze sobą dwuprzewodowym kablem sygnałowym (ekranowaną skrętką) długości do 1200 m. Jeśli wymagania aplikacyjne wymuszają stosowanie innych protokołów komunikacji przewodowej ze sterownikami PLC (np. Profibus), to są one zwykle dostępne jako opcje. Sterowanie napędami wielosilnikowymi, w których każdy silnik jest zasilany z indywidualnej przetwornicy częstotliwości, ale wszystkie pracują na wspólny, elastyczny lub sztywny, wał napędowy, wykorzystuje konfigurację master-slave.
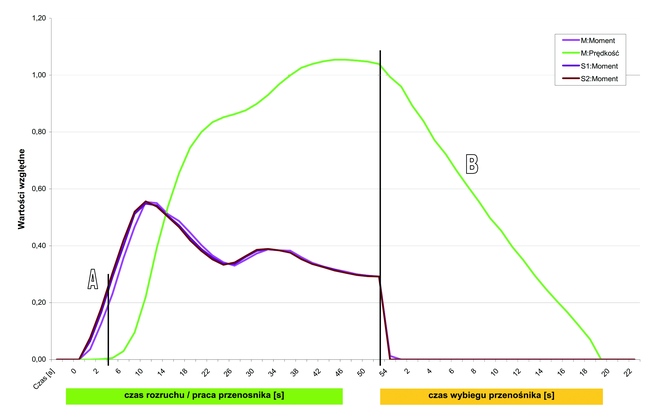
Przetwornica częstotliwości master jest sterowana prędkościowo, tzn. referencją prędkości. Zadana przez sterownik PLC prędkość obrotowa silnika dołączonego do przetwornicy ustala średnią prędkość wielosilnikowego zespołu napędowego, np. czołowego bębnów przenośnika taśmowego o regulowanej prędkości taśmy (w kopalni węgla brunatnego), rurowego korownika dłużyc (w zakładzie papierniczym), czy wywrotnicy wagonowej (w elektrowni). Wszystkie pozostałe przetwornice częstotliwości napędu grupowego przeznaczone są do silników typu slave i pracują w trybie momentowym, w którym następuje wzajemne wyrównywanie momentów obciążeń wszystkich silników. Moment referencyjny dla przetwornic częstotliwości slave jest zadawany z przetwornicy częstotliwości master. Prędkości obrotowe silników slave zmieniają się w zadanym przedziale zależnie od elastyczności i sprężystości wspólnego wału napędowego maszyny. Opisana konfiguracja master-slave jest realizowana z zastosowaniem nowoczesnych przetwornic o rozwiniętym oprogramowaniu wewnętrznym, dostosowanym do sterowania zespołami wielosilnikowymi. Na rysunku przedstawiono przebieg rozruchu zespołu trzech silników (w napędzie czołowym) nadkładowo-węglowego, taśmowego przenośnika powierzchniowego. Widoczne jest na nim samoczynne wyrównanie momentów napędowych wszystkich silników, a prędkość wypadkowa taśmy przenośnika jest zadawana ze sterownika PLC do przetwornicy częstotliwości master w taki sposób, aby nie powodować nadmiernego napinania taśmy w czasie rozruchu przenośnika. Zaznaczone są okresy: rozruchu taśmy przenośnika (A) i zatrzymywania wybiegiem (B).
Przetwornice częstotliwości - negatywne oddziaływanie przetwornicy na silnik i sieć
W uproszczeniu można sformułować stwierdzenie, że współczesna napędowa przetwornica częstotliwości to w pełni funkcjonalny, wyspecjalizowany komputer składający się z binarnego podzespołu sygnałowego (DSP) i binarnego zespołu mocy (falownika). Podstawowym mankamentem binarnego (0/1) charakteru napięcia falownika, którym zasilany jest silnik, jest występowanie: napięć zaburzeń różnicowych VDM – ang. Voltage Differential Mode (zaburzenia międzyfazowe) oraz napięć zaburzeń wspólnych VCM – ang. Voltage Common Mode (zaburzenia doziemne). Napięcie zaburzeń wspólnych VCM wymusza wysokoczęstotliwościowy prąd upływu doziemnego, który płynie przez uziemiony ekran kabla silnikowego, a tym samym występuje w systemie ochrony przeciwporażeniowej PE. Stosowanie ekranowanych kabli silnikowych wynika z konieczności spełnienia wymagań EMC. Przy braku ekranowania kabli silnikowych trzeba zachować odpowiednie odległości między ekranowanymi przewodami sygnałowymi i nieekranowanymi kablami silnikowymi, aby nie zakłócać mkomunikacji ze sterownikami PLC. Stosowanie odpowiednich filtrów na zasilaniu przetwornicy częstotliwości oraz po stronie silnikowej umożliwia wyeliminowanie napięć zaburzających VDM i VCM z napięcia zasilania silnika.
Należy podkreślić, że metody minimalizujące negatywne skutki napięcia zaburzeń wspólnych VCM zależą od układu sieciowego transformatora (TN lub IT) zasilającego przetwornicę częstotliwości. Przetwornice pobierają z transformatora zasilającego odkształcony (niesinusoidalny) prąd fazowy. Harmoniczne prądu fazowego transformatora to nieparzyste i niepodzielne przez trzykrotności częstotliwości napięcia sieci zasilania, dlatego mają charakter niskoczęstotliwościowy. Nie występuje tu przesunięcie harmonicznej podstawowej prądu fazowego względem napięcia fazowego transformatora, gdyż stopniem wejściowym przetwornic częstotliwości jest 6-plusowy prostownik diodowy, obciążony baterią kondensatorów. Moc bierna silnika nie wpływa do sieci zasilania, lecz krąży pomiędzy silnikiem i baterią kondensatorów za pośrednictwem diod zwrotnych falownika.
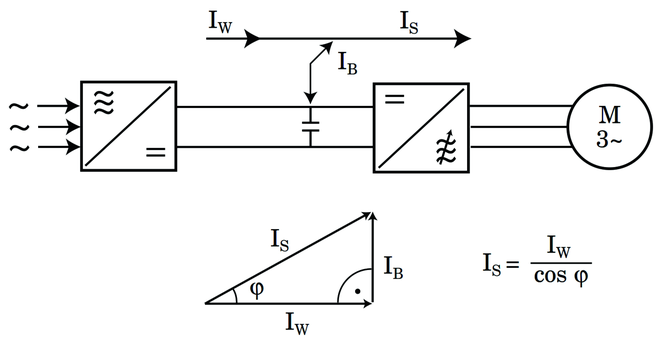
Z powyższego rysunku wynika, że z sieci zasilania pobierana jest jedynie moc czynna, której wartość zależy od momentu obciążenia silnika. Moc bierna silnika, wykorzystywana do budowy w nim strumienia magnetycznego, zależy od wartości napięcia jego zasilania i krąży między baterią kondensatorów przetwornicy częstotliwości i silnikiem. Do transformatora wpływa jedynie moc bierna wyższych harmonicznych prądu fazowego, zwana też mocą odkształconą, która powoduje zwiększenie strat czynnych w kablach zasilania przetwornicy częstotliwości i w transformatorze (P = R · I2).
Dąży się do ograniczenia odkształceń prądów fazowych poprzez stosowanie kilkuprocentowych dławików instalowanych po stronie zasilania prostownika przetwornicy częstotliwości (dławiki AC) lub po stronie stałonapięciowej prostownika (dławiki DC). Dławiki AC i DC wykorzystuje się w celu ograniczenia współczynnika odkształceń harmonicznych THDi do wartości około 40%. Przy takim poziomie (w warunkach nominalnego obciążenia przetwornicy częstotliwości) nie zachodzi potrzeba przewymiarowania zabezpieczeń nadprądowych na zasilaniu przetwornicy częstotliwości (np. szybkich wkładek bezpiecznikowych typu gR) lub zwiększania mprzekroju kabla zasilającego przetwornicę częstotliwości. Do poprawy mkształtu przebiegu prądowego w sieciach zasilania stosuje się też elektroenergetyczne filtry aktywne, które umożliwiają poprawę współczynnika mzawartości harmonicznych THDi do wartości poniżej 10%, niemniej jednak msą to rozwiązania wymagające znacznych nakładów finansowych oraz manalizy kosztów inwestycji i eksploatacji.
Przetwornice częstotliowści - podsumowanie
Przetwornice częstotliwości to obecnie ważny element każdego systemu napędowego. Są to urządzenia ciągle udoskonalane, zwiększa się ich moc i precyzja sterowania specjalistycznymi napędami. Stosowane są w coraz bardziej wymagających aplikacjach, np. charakteryzujących się znaczną dynamiką i dużym obciążeniem silnika w początkowej fazie rozruchu.
Oprogramowanie przetwornic częstotliwości można łatwo modyfikować poprzez aktualizacje, np. wczytywanie oprogramowań dla specjalistycznych aplikacji – nawijarek, wind czy wirówek. Zgodnie z rozporządzeniem WE 640/2000, dotyczącym ekoprojektu dla silników elektrycznych, od 2017 roku przetwornice częstotliwości muszą być stosowane do napędu niskonapięciowych silników indukcyjnych klatkowych o klasie sprawności IE2 i mocach 0,75–375 kW. Jedynie silniki o klasie sprawności IE3 mogą być zasilane bezpośrednio z sieci przemysłowej lub za pośrednictwem softstartu.
Przytoczone rozporządzenie WE przyczynia się do dalszego ich rozwoju i umocnienia przetwornic częstotliwości jako podstawowego zespołu systemu napędowego.
Artykuł ukazał się w publikacji „Sektor Elektroenergetyczny” 2015
Zobacz e-wydanie





